Many real-world robot deployments define routes as a sequence of waypoints — GPS coordinates, map nodes, or operator-specified targets. The challenge is generating smooth, dynamically feasible motion between them.
Approach
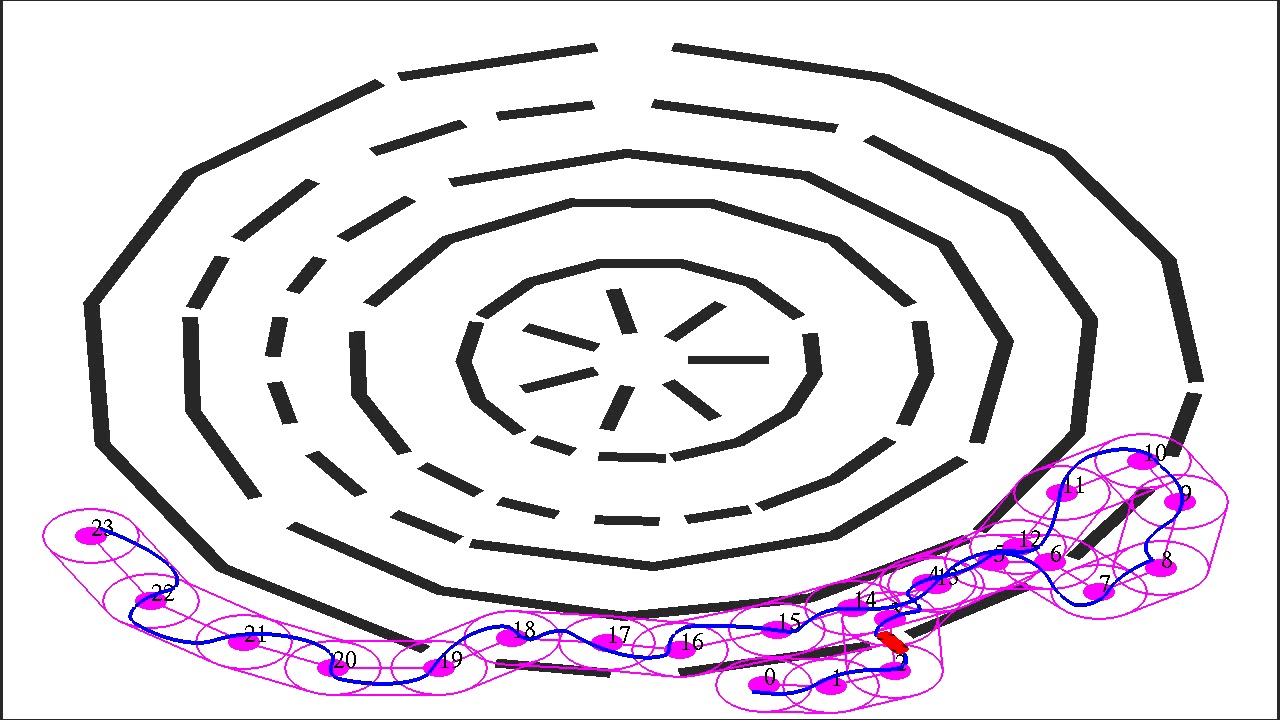
The planner tracks a waypoint sequence using a predictive lookahead strategy. Rather than steering toward the nearest waypoint directly, it looks ahead along the path to anticipate curvature and begin corrective maneuvers early.
Cross-track error — the lateral deviation from the intended path — is minimized continuously, keeping the robot on the desired corridor even under disturbances or initial misalignment.
Key properties:
- Handles waypoint sequences with varying spacing and heading changes
- Adapts speed near high-curvature segments
- Stable recovery when the robot deviates from the planned corridor
Videos
Robot follow waypoints
Application
Demonstrated on ground robots navigating through waypoint-defined routes in both structured and semi-structured environments. The controller reliably completes routes without manual parameter tuning per scenario.