Robots doing real tasks need to plan at two levels: what to do (pick up object A, move to room B) and how to physically move. INTERACT connects these two — you give it a task in PDDL, and it figures out both the action sequence and the collision-free trajectory to carry it out. The key idea is to grow a tree of physical motions, group states by what task conditions they satisfy, and use the task planner to steer which groups to expand next. The two levels keep feeding each other until a solution is found.
The INTERACT System
INTERACT (Interactive Search for Action and Motion Planning with Dynamics) integrates:
- Sampling-based motion planning — builds motion trees that are collision-free and dynamically feasible
- Action planning — accepts task specifications in PDDL format and reasons over symbolic predicates
The robot takes a PDDL task description as input and automatically produces trajectories that satisfy both the task goals and the physical constraints of the environment.
How It Works
The planner runs an iterative loop:
- Expand motion trees in the robot’s state space
- Partition tree nodes into equivalence classes based on task predicates (e.g., “holding object A”, “at location B”)
- Update action costs using motion tree data to guide the symbolic planner toward reachable goals
This feedback between the two planning layers avoids the common failure mode where the task planner proposes actions that are geometrically infeasible.
Results
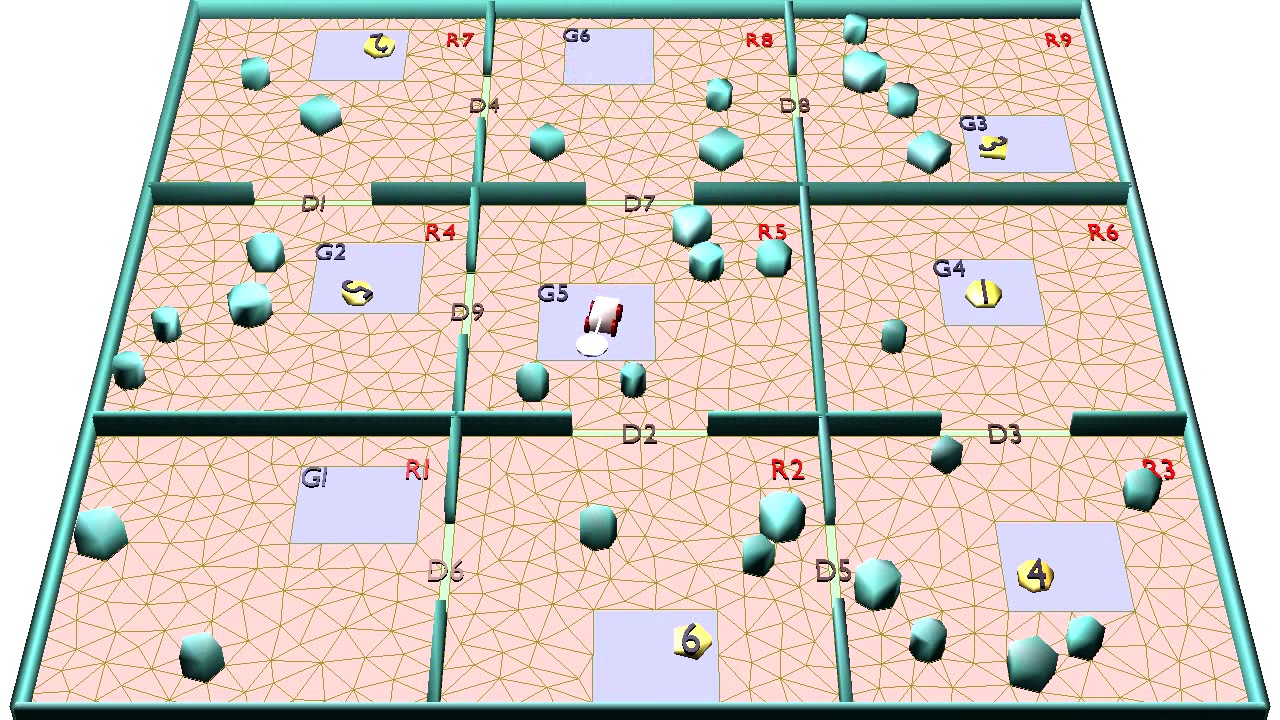
Tested on mobile robots executing pick-and-place tasks in environments with static and movable obstacles. INTERACT showed significant improvements over prior methods for combined planning problems, both in solution quality and planning time.
Videos
Robot moves objects to corresponding rooms (only 1 object per room at a time)
Publication
Interactive Search for Action and Motion Planning with Dynamics